
A Perspective by Ahmad Rafsanjani on the research article “Design and printing of proprioceptive three-dimensional architected robotic metamaterials” by Rayne Zheng and coworkers published in Science.
Towards a Soft Science of Soft Robots
The position paper presents an argument that aesthetic theory and practice are pertinent to the rapidly expanding field of soft robotics. Soft robotics as an aesthetic phenomenon is introduced and […]
Curvilinear Kirigami
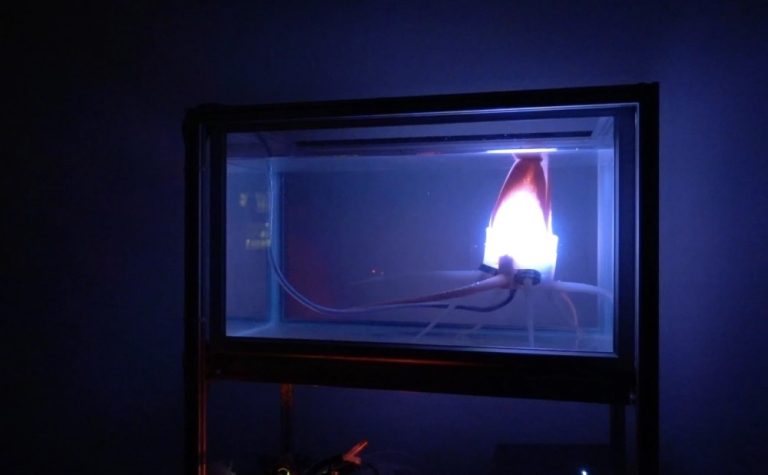
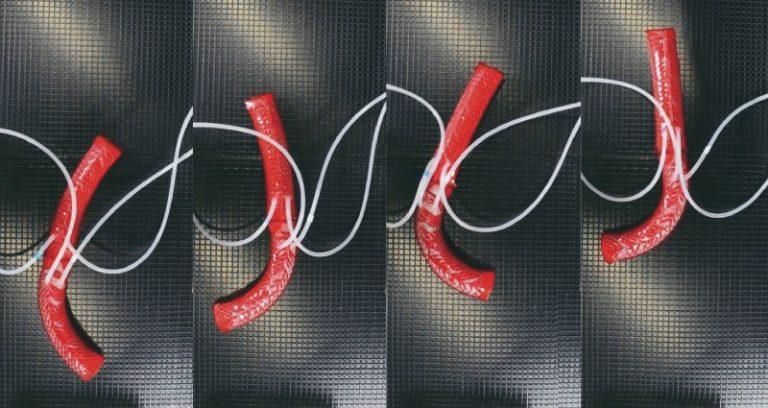
Abstract: The locomotion of soft snake robots is dependent on frictional interactions with the environment. Frictional anisotropy is a morphological characteristic of snakeskin that allows snakes to engage selectively with […]
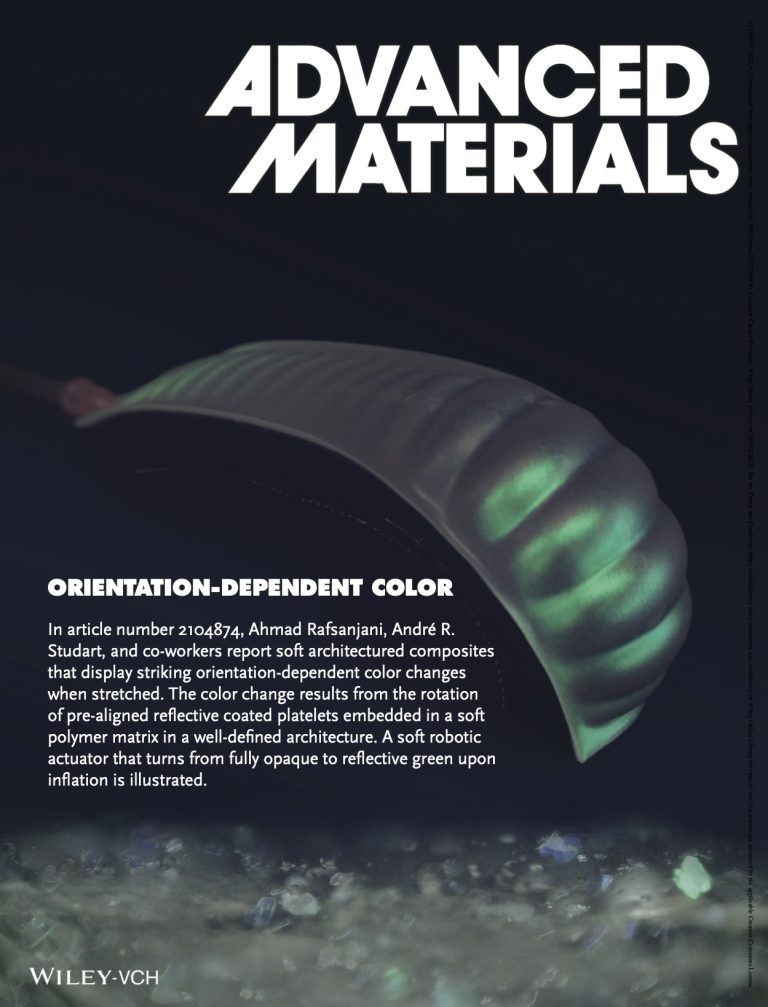
Color changing soft composites
Our article “Stretchable Soft Composites with Strain-Induced Architectured Color” is published in Advanced Materials, and featured as a frontispiece. Abstract: Colors enable interaction and communication between living species in a […]

Sapere Aude Research Leader Grant
Ahmad Rafsanjani receives a Sapere Aude Research Leader grant of DKK 6.2m awarded by the Independent Research Fund Denmark for the project “Seeing without Seeing through Bioinspired Soft Touch” that […]
New members
Meet our first group of research team members. From left to right: Jonathan Tirado (PhD student), Saravana Prashanth Murali Babu (Postdoc), Burcu Seyidoğlu (PhD student), and Mads Christensen (PhD student)

!Cartesian Shell
In 2020 the !brute_force installation served as a stage for Smrekar and her canine co-performers to climb on, while artificial intelligence algorithms analyzed their breathing, body temperature, and heartbeat. The […]

Introduction to Soft Robotics 2021
This course is an interdisciplinary introduction to soft robotics and reviews recent works and research in this field. Soft robots are an emerging class of robots that take inspiration from […]

Adaptive crawling with a soft skin
Ahmad Rafsanjani received the Villum Young Investigator grant 2021 from the Villum Foundation for the project “Adaptive crawling with a soft skin: Snake-inspired soft robot for rectilinear locomotion”. Snakes navigate […]