
!brute_force is an umbrella title for an ongoing research platform. The work is set up as a grid where a human and a dog climb through a landscape of tiles, […]
Category: Research
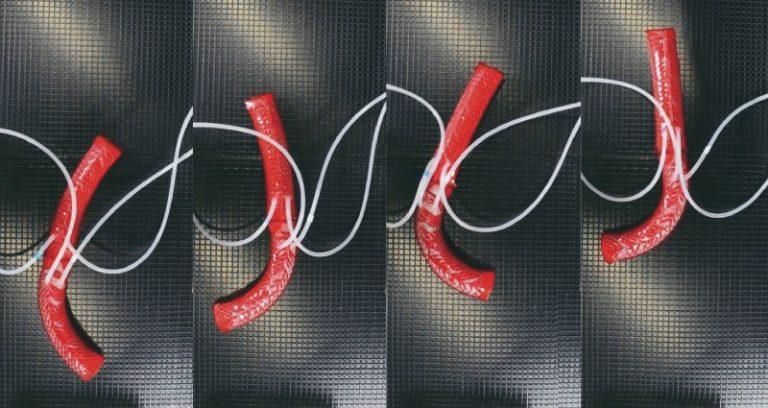
Curvilinear Kirigami
Abstract: The locomotion of soft snake robots is dependent on frictional interactions with the environment. Frictional anisotropy is a morphological characteristic of snakeskin that allows snakes to engage selectively with […]
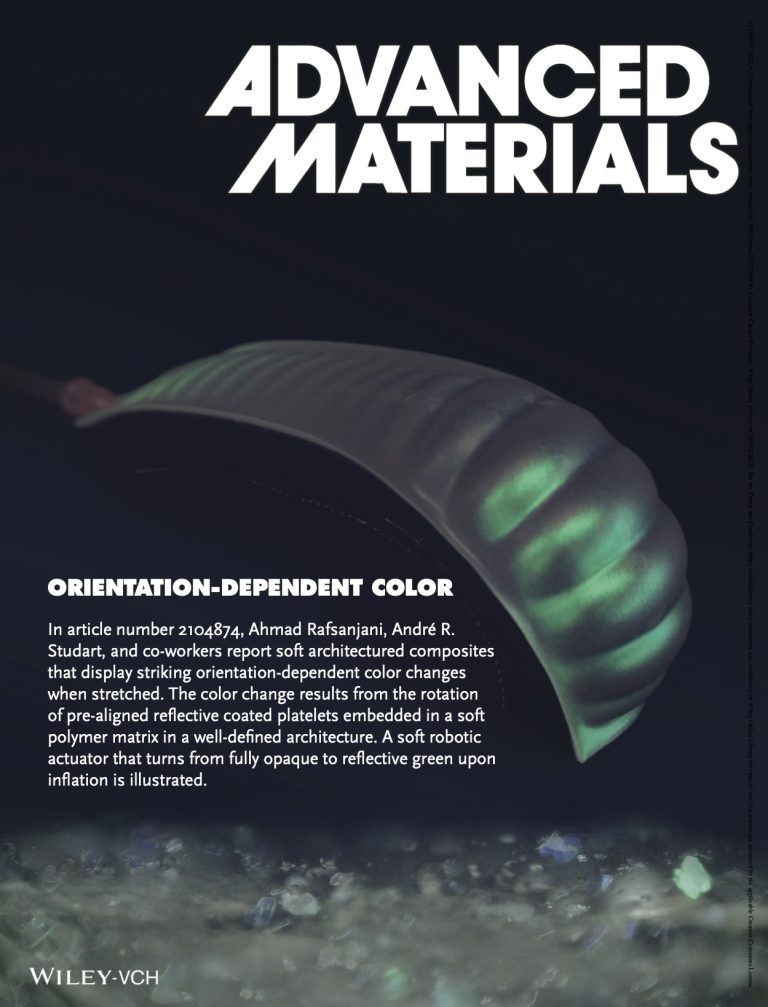
Color changing soft composites
Our article “Stretchable Soft Composites with Strain-Induced Architectured Color” is published in Advanced Materials, and featured as a frontispiece. Abstract: Colors enable interaction and communication between living species in a […]

!Cartesian Shell
In 2020 the !brute_force installation served as a stage for Smrekar and her canine co-performers to climb on, while artificial intelligence algorithms analyzed their breathing, body temperature, and heartbeat. The […]