The work of our PhD student Jonathan Tirado is published in Robotics Reports as an open access brief report. Congrats Jonathan and the whole team! Great contribution from our former visiting student Joséphine Moisson de Vaux from École Centrale de Marseille (France)!
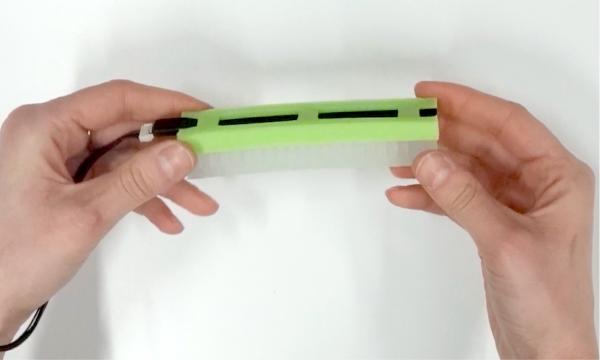
Abstract: A PneuNets actuator consists of a network of interconnected air chambers embedded in an elastomeric substrate attached to a stretch-limiting layer. It is one of the most common soft robotic bending actuators. Despite the versatility of PneuNets actuators in tasks like locomotion and grasping, precise control of their bending motion requires proprioceptive feedback. In this study, we introduce a modular design for integrating a soft sensor into a PneuNets actuator and couple it with a closed-loop control algorithm to achieve proprioceptive feedback. We embedded an off-the-shelf soft capacitive bend sensor into the strain-limiting layer of the actuator to measure angular displacement. Then, we employed a calibrated proportional-integral-derivative controller and tuned it with image-based linearization to accurately control the actuator to follow an input angle trajectory. The proposed approach enhances control precision and promotes modularity, supporting the development of sustainable soft robots with reusable and interchangeable components.

Tirado, J., Moisson de Vaux, J., Seyidoğlu, B., Murali Babu, S. P., Jørgensen, J., & Rafsanjani, A. (2024). Feedback Control of a Modular Proprioceptive Soft Actuator. Robotics Reports, 2(1), 128-133.